發布日期:2022-10-11 來源:環球電氣之家 作者:環球電氣之家 點擊率:2607 品牌:組態王_Kingview
看看來自與官方的發那科工業機器人主要參數介紹。
重復定位精度、可動范圍、手部負載,這些術語究竟代表些什么?
接下來介紹的是發那科機器人的主要參數
看完后相信你會對機器人參數不再陌生。
使用機器人時應保證機器人的負載條件在手部允許負載線圖所示范圍內。機型不同,法蘭盤不同,其手部負載條件不同。詳情參閱相關手部允許負載線圖。此處以R-2000iB/165F,ISO法蘭盤為例:
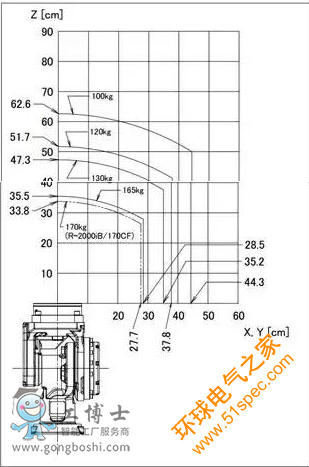
圖一:手部允許負載線圖(R-2000iB/165F,ISO法蘭盤)
發那科機器人有2軸、3軸、4軸、5軸和6軸機器人。

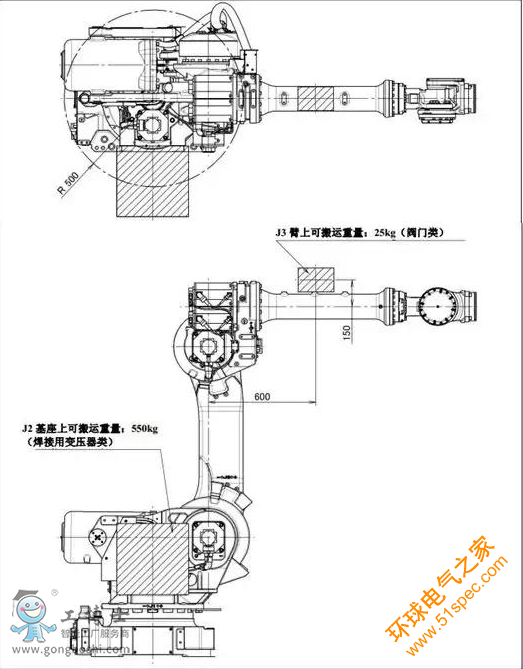
各機型的J2機座/J3手臂/J3外殼上的負載條件請參考其機型機構部操作說明書。此處以R-2000iB/165F為例:
圖三:J1、J2、J3軸機械式制動器位置(R-2000iB/165F)
機器人的安裝方式有:地面安裝,頂吊安裝,高臺安裝,傾斜角安裝。具體機型的安裝方式詳見其機構部操作說明書。
此處列舉部分機型的安裝方式:
地面安裝:R-2000iB/165F;頂吊安裝:R-2000iB/150U;高臺安裝:R-2000iB/200R;傾斜角安裝:LR Mate 200iD

重復定位精度指的是機器人重復到達一個位置的精度。各機型的重復定位精度請參考其機型機構部操作說明書中的規格一覽表。此處以LR Mate 200iD為例:LR Mate 200iD的重復定位精度為±0.02mm。
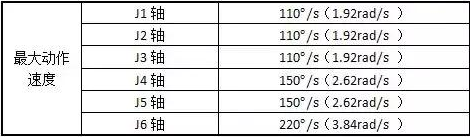
大動作速度指機器人運動時各軸所能達到的高速度。各機型各軸的大運動速度請參考其機型機構部操作說明書中的規格一覽表。 注:短距離移動時有可能達不到各軸的高速度。此處以R-2000iB/165F為例:
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


